Use Cases
UC1: Coastline litter Pollution:
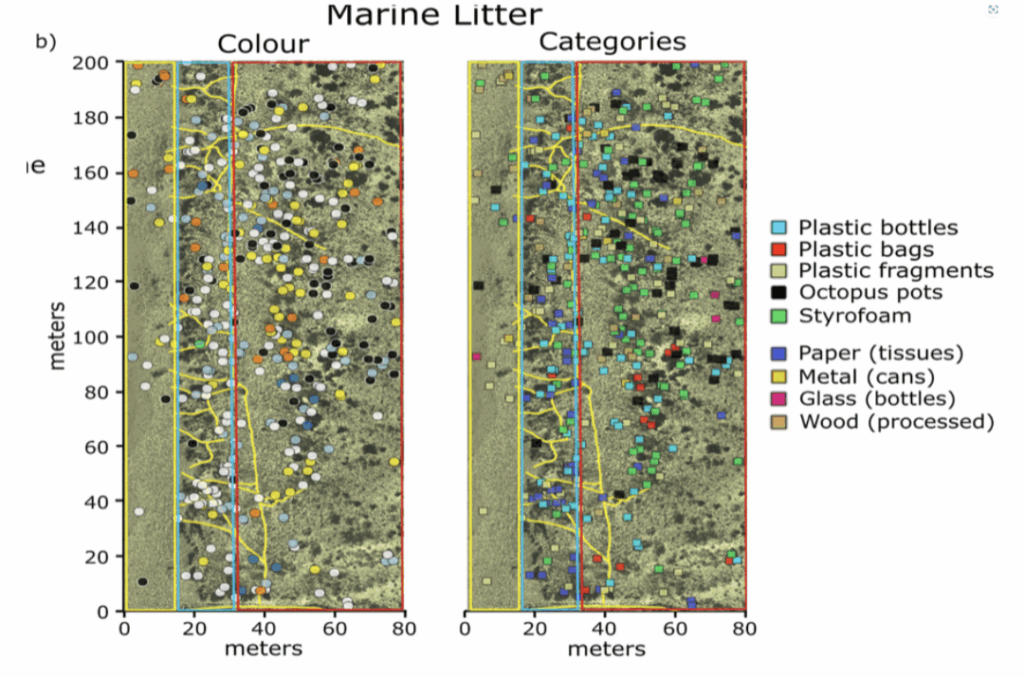
UAVs offer a cost- and time-effective method for assessing coastline litter pollution. Various studies highlight the potential of different sensors (RGB, NIR, Thermal) in detecting plastic, metal, and other types of Anthropogenic Marine Debris (AMD) (Figure 4). Most approaches employ Machine Learning (ML) algorithms such as Random Forest (RF) and Support Vector Machines (SVM), while Deep Learning (DL) techniques, especially Convolutional Neural Networks (CNNs), show promising results. However, high computational requirements remain a challenge.
The literature identifies several gaps related to the standardization and optimization of UAV-based coastal pollution monitoring methods. UAV systems face hardware limitations like restricted battery life, while environmental factors such as light, wind, and humidity affect flight performance. Additionally, AMD often accumulates in remote areas where operator access is limited, though Beyond Visual Line of Sight (BVLOS) systems show promise for overcoming this issue.
Some of the key applications to be explored are:
1. Evaluating the performance of different UAV sensors (RGB, NIR, Thermal) for AMD
detection.
2. Applying ML and DL models (RF, SVM, CNNs) for classification of coastal litter types.
3. Exploring the use of BVLOS UAV systems to access remote litter accumulation zones.
UC 2: Detecting vineyards and/or annual crops and assessing their health:
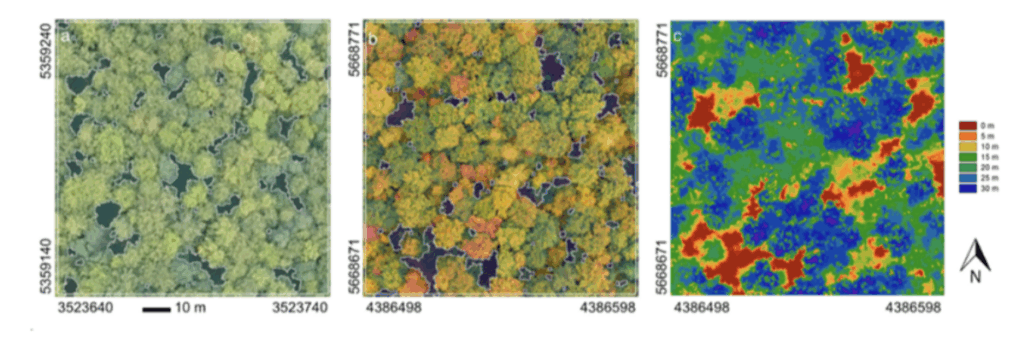
UAVs have emerged as a transformative technology in agriculture, enabling efficient
monitoring, crop management, and accurate phenotyping (Figure 5). However, their full potential in monitoring crop physical properties remains underexploited due to several unresolved challenges. Although UAVs can be equipped with sensors like LiDAR or multispectral cameras, accurately detecting plant pigments or water content is still difficult, despite its relevance to precision agriculture.
Improving lightweight digital cameras and addressing issues such as poorly calibrated spectral response curves can enhance image quality and processing. Automatically detecting the crop of interest also remains a challenge. Machine Learning (ML) and Deep Learning (DL) object-based methods offer promising results for crop detection and health assessment.
Nevertheless, there are constraints related to the high computational demands of these methods, particularly when deployed over large areas or in BVLOS operations. The lack of suitable open-source visualization and processing tools also limits practical implementation in vegetation health assessment and precision agriculture applications.
Some of the key applications to be explored are:
1. Improving sensor calibration and image quality for UAVs used in crop monitoring.
2. Applying ML and DL techniques for automatic crop detection and health assessment.
3. Developing open-source tools to support scalable processing and visualization of UAV-acquired data.
UC 3: Monitoring air quality parameters (PMs, RH, Air temperature) in urban environments using UAVs:
UAVs are increasingly used to monitor urban air pollution due to their cost-efficiency and reliability, often utilizing high-resolution imagery and low-cost sensors . These sensors have been employed to measure a variety of pollutants, including CO, CO₂, CH₄, PM, NO₂, and NH₃. BVLOS flights are recommended for broader area coverage.
The integration of AI and Deep Learning (DL) significantly enhances UAV capabilities in air quality monitoring. DL models help detect pollution patterns, recognize anomalies, identify hotspots and sources, and track temporal changes. Models such as CNNs, LSTM, and Spatiotemporal Deep Learning architectures have been applied to process air pollution data with spatial and temporal dimensions.
However, UAVs face limitations such as restricted payload and battery life. Additionally, current DL models struggle to accurately simulate complex atmospheric conditions, which affects prediction quality and drone stability. A lightweight, low-cost multi-sensor system is essential for effective data collection, along with appropriate DL algorithms and visualization tools.
Some of the key applications to be explored are:
1. Using UAVs with low-cost sensors to monitor PMs, relative humidity, and air
temperature.
2. Applying DL models (CNNs, LSTM, STDL) to detect pollution patterns and sources.
3. Developing a prototype UAV with integrated multi-sensor and visualization tools for
efficient monitoring.

UC 4: Cultural Heritage observation:
UAV technology is widely used in Cultural Heritage monitoring, particularly in two key areas:
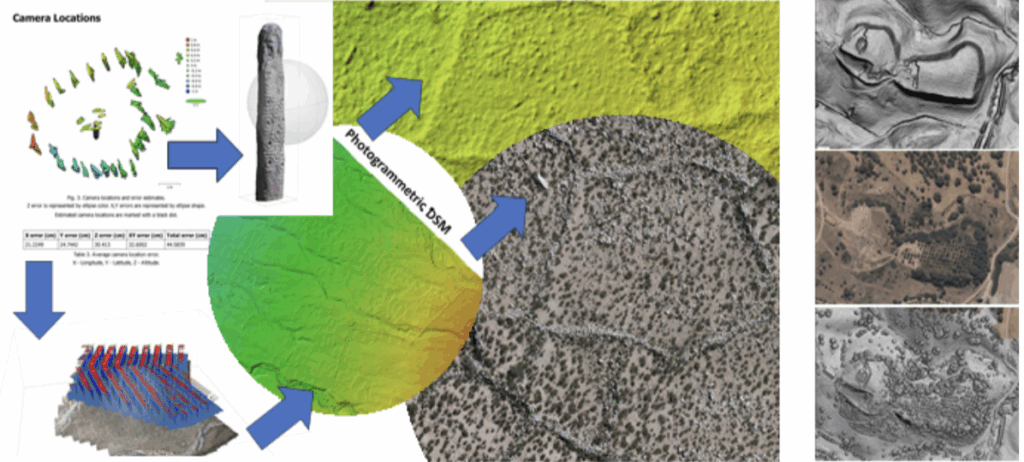
the rapid expansion of 2D/3D site-based documentation and the development of machine learning (ML) methods for feature extraction. UAVs are employed in documenting archaeological monuments and excavation sites, generating photogrammetric models, and discovering new features. They offer advantages over traditional aerial reconnaissance, such as improved agility, cost-efficiency, higher ground resolution, and detailed 3D model extraction.
Deep Learning (DL) is emerging as a standard AI tool in cultural heritage applications. ML algorithms have recently proven effective in archaeological contexts, enabling automatic detection of sites and features. UAVs can detect new or previously unknown archaeological elements, such as stone scatters, topographic variations, or vegetation patterns (see Figure 7).
However, broader applicability is constrained by hardware and software limitations,
including battery life, flight system capabilities, and processing software unable to handle large datasets efficiently.
Some of the key applications to be explored are:
1. Using UAVs for 2D/3D documentation of archaeological sites and excavations.
2. Applying ML and DL methods for automatic feature detection in cultural heritage
landscapes.
3. Addressing UAV limitations through improved hardware and data processing tools
for large-scale archaeological surveys.